
11/30/14 - 12/6/14
The team has been spending this week completing the functional prototype for the Design Expo at the end of the week. Crew members Kai Duncan and Andrew Woo have established wireless connection between the Arduino and the gimbal setup and have been able to control the motion of each axis on the gimbal. The following videos were recorded in order to demonstrate the range of motion of the gimbal as if it were mounted on the quadcopter.
11/23/14 - 11/29/14
Since Thanksgiving holiday occurred on this week, there was not much time to meet in groups and work over the break. However, during the beginning of the week, crew members Daniele Grandi, Joshua Medoff, and Andrew Woo began writing the code to be used in controlling the motion of the 3-axis gimbal. Additionally, Joseph Chung and Deepak Talwar were able to attach two cameras to the drone's camera mount and render the video feed on a computer screen.

11/16/14 - 11/22/14
The majority of the team effort this week was put into researching the type of hardware and software needed for the quadcopter control systems that have not yet been completed. The team has decided to use a StorM32 board in the control system that will communicate directions from the user to the 3-axis gimbal and allow the user to control the orientation of the stereoscopic camera mounted on the copter.
11/09/14 - 11/15/14
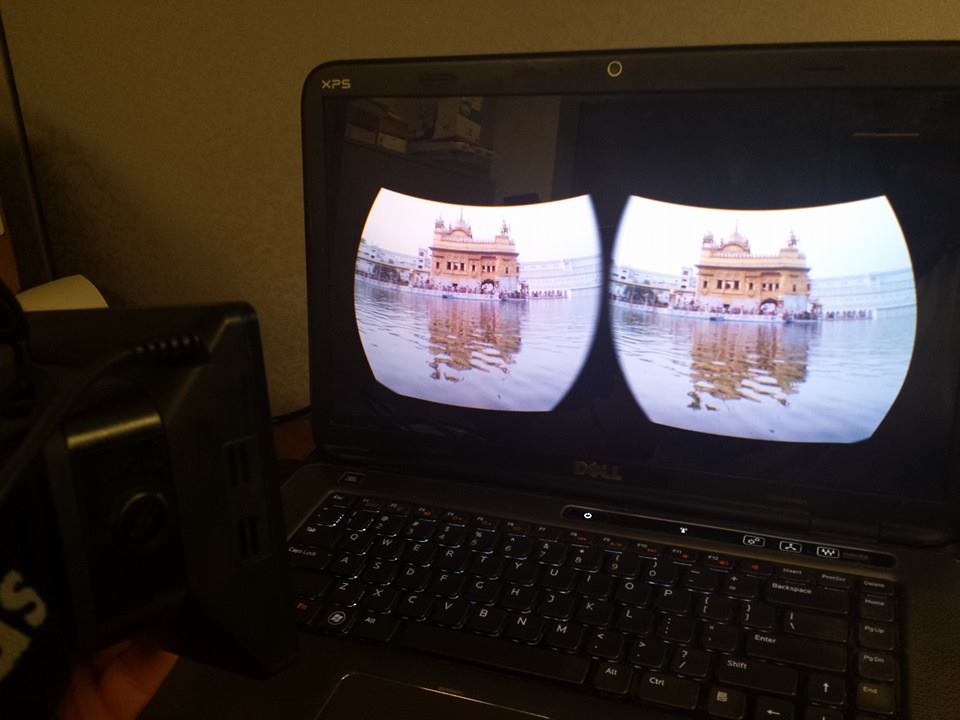
This week we made a lot of progress in our project. One important breakthrough made was figuring out how render 3D video on the Oculus Rift. Pictured below is a 3D video that crew member Deepak Talwar recorded two years ago. Passing these images into the Oculus Rift, we have discovered that only minimal adjustments are needed to ensure the best quality of image. The only major step left is to figure out how to use OPENCV to simultaneously render video feeds from two separate cameras; after doing so, the video transmission aspect of our project will be complete.
Also, we have figured out how to send data from our Arduino to the gimbal using a serial breakout board. The following video contains crew members Andrew Woo and Daniele Grandi demonstrating the functionality of our setup.
11/02/14 - 11/08/14
We acquired cameras and began developing a way to integrate them into our device. This week, using DirectShow, we figured out how to wirelessly transmit video without noticeable lag in the video feed from the cameras to the Oculus Rift. However, we discovered that our digitizer does not render images or colors properly, and it must be replaced.
Additionally, crew members Andrew Woo and Kai Duncan were able to configure the IMU setup to determine the orientation of the quadcopter. The following video demonstrates the functionality of the setup.
Additionally, crew members Andrew Woo and Kai Duncan were able to configure the IMU setup to determine the orientation of the quadcopter. The following video demonstrates the functionality of the setup.
10/26/14 - 11/01/14
We discussed what types of cameras we could potentially use for our device. Additionally, we 3D-printed some basic parts for the gimbal setup (specifically the top mount and the pitch arm); although these turned out to be slightly bigger than we had expected, we are confident that we can still use them for our device.


On top of this, crew member Deepak Talwar worked on the task of rendering video feeds from two separate cameras simultaneously. In the following video he demonstrates the final result of the rendering.
