
Design Flowchart
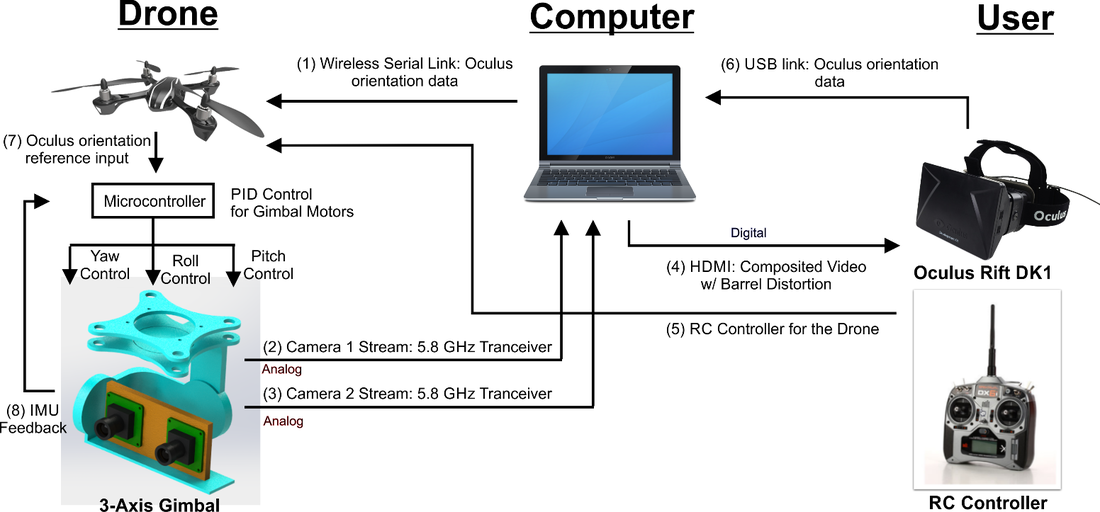
The user will wear the Oculus Rift on his/her head, while holding the RC controller in his/her hands. As the user moves the thumbsticks on the RC controller, these inputs will be sent via radio signal on the 2.4GHz band to the quadcopter (Link (5)). The quadcopter will interpret those signals using its onboard microcontroller, outputting voltages that will be sent to the motors, thereby changing the quadcopter’s flight according to the user inputs. As the user moves his/her head, the Oculus Rift will use its sensors to determine orientation and the path taken to get to that orientation. This data will be sent via USB to a computer, which will serve as the main hub of the entire system (Link (6)). The computer will turn the data into signals and send them to a receiver on the quadcopter via a wireless serial link (Link (1)). A microcontroller on board the quadcopter will take the signals and interpret them, sending out voltages to the three motors that make drive the gimbal (Link (7)). The motors will move, and the microcontroller will receive data from a 6 degree of freedom IMU (contains gyroscope and accelerometer) (Link (8)). The microcontroller will use that sensor data to close the feedback loop and ensure the camera is pointed in the direction the signals from the computer specify, while simultaneously rejecting outside disturbances (like quadcopter changing pitch, roll, yaw in response to wind or user inputs). The two cameras mounted on the gimbal are necessary to create the stereoscopic video stream for the Oculus Rift—video will be captured and sent via 5.8 GHz radio signals to the computer (Links (2) and (3)). The computer will stitch these two video streams together, prepare it for the Oculus Rift (it needs to be in a specific format), and then send it to the Oculus Rift via HDMI for the user to see (Link (4)). All of the electronics on the quadcopter will be powered by the quadcopter’s battery, the computer and Oculus Rift.
